
Questão número 526957
Deseja-se controlar o sistema linear, representado pelo modelo em espaço de estado, cujas equações são mostradas a seguir
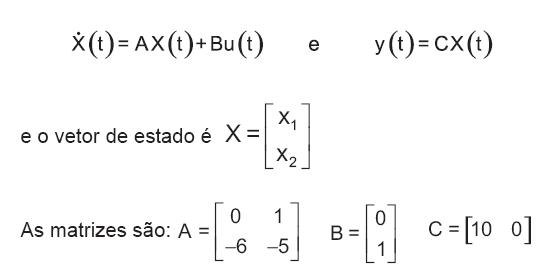
A estratégia de controle consiste em usar a seguinte realimentação: u(t) = − K X(t), onde K = [k1 k2] e alocar os polos de malha fechada no plano S em s1 = −5 +j5 e s2 = −5 −j5. O valor do vetor de ganhos K é
- A.
K = [ 5 44]
- B.
K = [ 44 5]
- C.
K = [ −5 −44]
- D.
K = [ 56 15]
- E.
K = [ −44 −5]

O Provas e Concursos é um banco de dados de questões de concursos públicos organizadas por matéria, assunto, ano, banca organizadora, etc
