
Questão número 530804
Engenharia Eletrônica - Eletrônica de Potência - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Desprezando não-linearidades, considere um servomecanismo, implementado com um motor de corrente contínua e um tacômetro acoplado em seu eixo, que possui função de transferência dada por ,
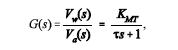
em que VW (s) e Va (s) correspondem às transformadas de Laplace da tensão de saída do tacômetro e tensão de armadura do motor, respectivamente. KMT e J são constantes positivas. A dinâmica do amplificador de excitação de tensão, assumida como estática, é dada pelo ganho KAmp . Para controle de velocidade, o amplificador, o motor e o tacômetro estão em cascata, e realimentação negativa unitária é utilizada. Acerca do controle dinâmico do processo apresentado, julgue os itens a seguir.
Se o sinal de referência de velocidade tiver forma parabólica com relação ao tempo, a resposta do sistema não conseguirá acompanhá-lo e tenderá a apresentar erro infinito quando o tempo tender ao infinito.
- C. Certo
- E. Errado

O Provas e Concursos é um banco de dados de questões de concursos públicos organizadas por matéria, assunto, ano, banca organizadora, etc
