
Questões de Engenharia Eletrônica
Lista completa de Questões de Engenharia Eletrônica para resolução totalmente grátis. Selecione os assuntos no filtro de questões e comece a resolver exercícios.
Assinale a alternativa que completa corretamente as lacunas da afirmação seguinte:
"O circuito integrador é um filtro ...... operando em uma freqüência muito ...... que a sua freqüência de corte."
- A.
passa-altas - menor
- B.
passa-altas - maior
- C.
passa-baixas - maior
- D.
passa-baixas - menor
- E.
passa-faixa - menor
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
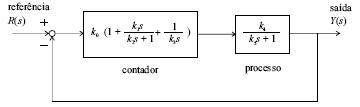
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
Considere que o sistema seja estável e K3 seja não-nulo e finito. Nesse caso, em regime permanente para uma entrada de referência do tipo degrau, o erro será nulo.
- C. Certo
- E. Errado
Um circuito formado por dois resistores em série de valores R e 4R é alimentado por uma tensão de 6V. Nesse caso, a queda de tensão no resistor de valor 4R vale
- A.
1,2V.
- B.
2,4V.
- C.
3,8V.
- D.
4,8V.
- E.
6,0V.
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
O sistema utiliza um procedimento de realimentação negativa unitária.
- C. Certo
- E. Errado
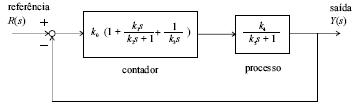
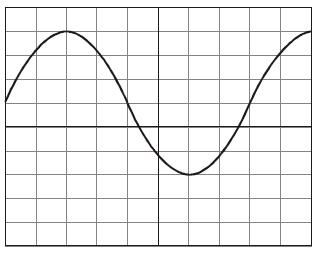
Atenção: Para responder às questões de números 55 e 56 utilize a figura seguinte que representa um sinal na tela de um osciloscópio e abaixo a sua calibração.
Calibração do osciloscópio:
Ganho vertical: 2V / DIV
Ganho horizontal: 50µs / DIV
A tensão pico a pico do sinal vale
- A.
8V.
- B.
12V.
- C.
24V.
- D.
36V.
- E.
40V.
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
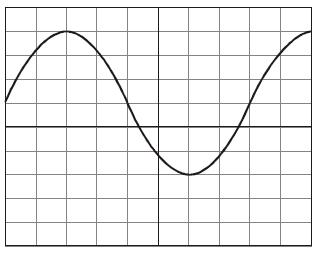
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
Sendo as constantes não-nulas, o controlador é unicamente do tipo PD (proporcional e derivativo).
- C. Certo
- E. Errado
Atenção: Para responder às questões de números 55 e 56 utilize a figura seguinte que representa um sinal na tela de um osciloscópio e abaixo a sua calibração.
Calibração do osciloscópio:
Ganho vertical: 2V / DIV
Ganho horizontal: 50µs / DIV
A freqüência do sinal vale
- A.
25kHz.
- B.
5kHz.
- C.
2,5kHz.
- D.
250kHz.
- E.
50kHz.
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
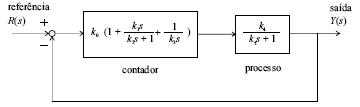
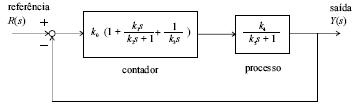
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
O termo  terá uma ação derivativa para qualquer componente de freqüência presente no sistema.
terá uma ação derivativa para qualquer componente de freqüência presente no sistema.
- C. Certo
- E. Errado
Atenção: A figura abaixo representa uma fonte de alimentação e refere-se às questões de números 57 a 60.
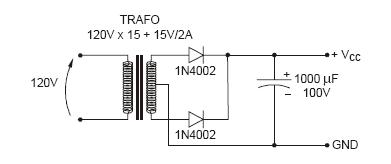
Se o transformador tiver 480 espiras no enrolamento primário, o enrolamento secundário terá um total de
- A.
100 espiras.
- B.
120 espiras.
- C.
240 espiras.
- D.
480 espiras.
- E.
600 espiras.
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
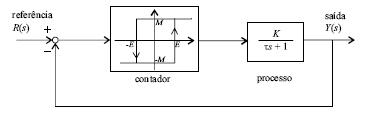
Um dos tipos de controladores industriais mais simples e comumente utilizado é o controlador liga-desliga (on-off). A figura acima apresenta o diagrama de um sistema de controle que utiliza essa abordagem. No sistema, os parâmetros M, E, K e J são constantes positivas e KM > E. Considerando o diagrama do sistema, julgue os itens a seguir.
O referido sistema é linear.
- C. Certo
- E. Errado

O Provas e Concursos é um banco de dados de questões de concursos públicos organizadas por matéria, assunto, ano, banca organizadora, etc
