
Questões de Engenharia Eletrônica do ano 2007
Lista completa de Questões de Engenharia Eletrônica do ano 2007 para resolução totalmente grátis. Selecione os assuntos no filtro de questões e comece a resolver exercícios.
Engenharia Eletrônica - Eletrônica de Potência - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Desprezando não-linearidades, considere um servomecanismo, implementado com um motor de corrente contínua e um tacômetro acoplado em seu eixo, que possui função de transferência dada por ,
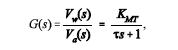
em que VW (s) e Va (s) correspondem às transformadas de Laplace da tensão de saída do tacômetro e tensão de armadura do motor, respectivamente. KMT e J são constantes positivas. A dinâmica do amplificador de excitação de tensão, assumida como estática, é dada pelo ganho KAmp . Para controle de velocidade, o amplificador, o motor e o tacômetro estão em cascata, e realimentação negativa unitária é utilizada. Acerca do controle dinâmico do processo apresentado, julgue os itens a seguir.
Se o sinal de referência de velocidade tiver forma parabólica com relação ao tempo, a resposta do sistema não conseguirá acompanhá-lo e tenderá a apresentar erro infinito quando o tempo tender ao infinito.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere um controlador discreto dado pela seguinte função no domínio-z:
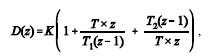
, em que os parâmetros K, T, T1 e T2 são constantes reais e positivas. A partir da análise de D(z), julgue os itens subseqüentes.
Esse controlador acrescenta um pólo em z = 1 na função de transferência de malha aberta do sistema a ser controlado.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere um controlador discreto dado pela seguinte função no domínio-z:
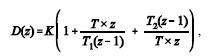
, em que os parâmetros K, T, T1 e T2 são constantes reais e positivas. A partir da análise de D(z), julgue os itens subseqüentes.
Dependendo do processo a ser controlado, o termo  tem uma ação tal que permite reduzir ou eliminar, no sistema, erros em regime permanente.
tem uma ação tal que permite reduzir ou eliminar, no sistema, erros em regime permanente.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere um controlador discreto dado pela seguinte função no domínio-z:
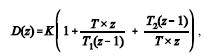
, em que os parâmetros K, T, T1 e T2 são constantes reais e positivas. A partir da análise de D(z), julgue os itens subseqüentes.
Esse controlador é não-linear.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere um controlador discreto dado pela seguinte função no domínio-z:
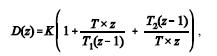
, em que os parâmetros K, T, T1 e T2 são constantes reais e positivas. A partir da análise de D(z), julgue os itens subseqüentes.
Esse controlador tem simplesmente uma ação proporcional.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere a seguinte equação discreta no tempo

que caracteriza determinado sistema discreto no tempo, em que a1 , b0 e b1 são constantes reais. Julgue os itens seguintes, relativos a essa equação.
Essa equação discreta pode caracterizar a discretização de um compensador de avanço contínuo.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Considere a seguinte equação discreta no tempo

que caracteriza determinado sistema discreto no tempo, em que a1 , b0 e b1 são constantes reais. Julgue os itens seguintes, relativos a essa equação.
Essa equação caracteriza um filtro FIR (finite impulse response), ou seja, resposta ao impulso finita no tempo.
- C. Certo
- E. Errado
Considere um processo linear caracterizado pelas seguintes equações:
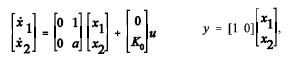
, em que x1(t) e x 2 (t) são as variáveis de estado do processo, y(t) é a variável de saída e u(t) é a variável de entrada. K0 e a são parâmetros reais e constantes. A respeito desse processo e de suas características dinâmicas, julgue os itens subseqüentes.
Esse processo não possui pólo na origem do plano complexo s.
- C. Certo
- E. Errado
Considere um processo linear caracterizado pelas seguintes equações:
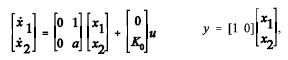
, em que x1(t) e x 2 (t) são as variáveis de estado do processo, y(t) é a variável de saída e u(t) é a variável de entrada. K0 e a são parâmetros reais e constantes. A respeito desse processo e de suas características dinâmicas, julgue os itens subseqüentes.
Se a for positivo, então o processo terá pelo menos um autovalor real positivo.
- C. Certo
- E. Errado
Considere um processo linear caracterizado pelas seguintes equações:
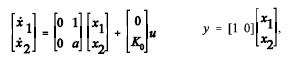
, em que x1(t) e x 2 (t) são as variáveis de estado do processo, y(t) é a variável de saída e u(t) é a variável de entrada. K0 e a são parâmetros reais e constantes. A respeito desse processo e de suas características dinâmicas, julgue os itens subseqüentes.
Esse processo possui dois zeros no infinito.
- C. Certo
- E. Errado

O Provas e Concursos é um banco de dados de questões de concursos públicos organizadas por matéria, assunto, ano, banca organizadora, etc
