
Questões de Engenharia Eletrônica do ano 2007
Lista completa de Questões de Engenharia Eletrônica do ano 2007 para resolução totalmente grátis. Selecione os assuntos no filtro de questões e comece a resolver exercícios.
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Controle digital de um processo dinâmico corresponde à inserção de um computador em uma malha de controle. O computador terá como tarefa ajustar o desempenho dinâmico do sistema em malha fechada de forma a atender determinadas especificações de desempenho. Os processos físicos a serem controlados se caracterizam por apresentar variáveis analógicas, enquanto no domínio do computador (algoritmo de controle) as variáveis se caracterizam por serem digitais. A respeito das características dos sistemas de controle digital, julgue os próximos itens.
Os algoritmos de controle digital implementam diretamente equações diferenciais e funções de transferências no domínio de Laplace.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Controle digital de um processo dinâmico corresponde à inserção de um computador em uma malha de controle. O computador terá como tarefa ajustar o desempenho dinâmico do sistema em malha fechada de forma a atender determinadas especificações de desempenho. Os processos físicos a serem controlados se caracterizam por apresentar variáveis analógicas, enquanto no domínio do computador (algoritmo de controle) as variáveis se caracterizam por serem digitais. A respeito das características dos sistemas de controle digital, julgue os próximos itens.
Considere que um processo discreto linear tenha por representação entrada/saída a função de transferência a seguir.
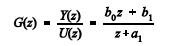
Nesse caso, o referido processo é caracterizado pela equação discreta y(k) + a1y(k - 1) = b0u(k) + b1u(k - 1), em que {y(k)} e {u(k)} são as seqüências de saída e entrada, respectivamente, com amostras y(k) = 0 e u(k) = 0, para k < 0.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Controle digital de um processo dinâmico corresponde à inserção de um computador em uma malha de controle. O computador terá como tarefa ajustar o desempenho dinâmico do sistema em malha fechada de forma a atender determinadas especificações de desempenho. Os processos físicos a serem controlados se caracterizam por apresentar variáveis analógicas, enquanto no domínio do computador (algoritmo de controle) as variáveis se caracterizam por serem digitais. A respeito das características dos sistemas de controle digital, julgue os próximos itens.
Considere que a função de transferência de um sistema discreto no tempo seja conhecida. Nesse caso, para uma dada seqüência de entrada, é possível obter a seqüência de saída desse sistema realizando uma operação de convolução discreta entre a seqüência de entrada e a função de transferência.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
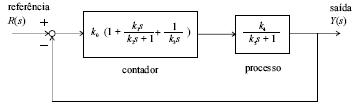
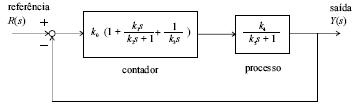
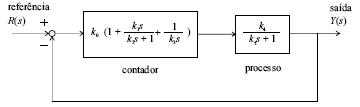
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
Se K1 = 0 e K3 tender ao infinito, pode-se afirmar que o sistema é do tipo 1.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
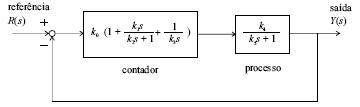
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
Considere que o sistema seja estável e K3 seja não-nulo e finito. Nesse caso, em regime permanente para uma entrada de referência do tipo degrau, o erro será nulo.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
O sistema utiliza um procedimento de realimentação negativa unitária.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
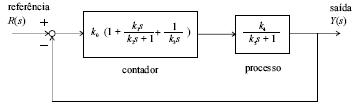
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
Sendo as constantes não-nulas, o controlador é unicamente do tipo PD (proporcional e derivativo).
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
A figura acima apresenta um sistema de controle dinâmico linear na forma de diagrama de blocos. Nesse sistema, todas as constantes Ki (i = 0, 1, ..., 5) são não-negativas. Considerando esse sistema, julgue os itens que seguem.
O termo  terá uma ação derivativa para qualquer componente de freqüência presente no sistema.
terá uma ação derivativa para qualquer componente de freqüência presente no sistema.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
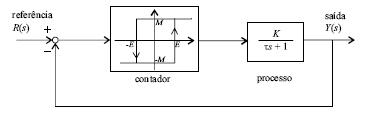
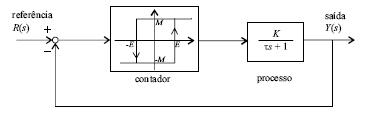
Um dos tipos de controladores industriais mais simples e comumente utilizado é o controlador liga-desliga (on-off). A figura acima apresenta o diagrama de um sistema de controle que utiliza essa abordagem. No sistema, os parâmetros M, E, K e J são constantes positivas e KM > E. Considerando o diagrama do sistema, julgue os itens a seguir.
O referido sistema é linear.
- C. Certo
- E. Errado
Engenharia Eletrônica - Sistemas de Controle - Centro de Seleção e de Promoção de Eventos UnB (CESPE) - 2007
Um dos tipos de controladores industriais mais simples e comumente utilizado é o controlador liga-desliga (on-off). A figura acima apresenta o diagrama de um sistema de controle que utiliza essa abordagem. No sistema, os parâmetros M, E, K e J são constantes positivas e KM > E. Considerando o diagrama do sistema, julgue os itens a seguir.
Se a malha de realimentação for aberta, em condição de equilíbrio, a saída do sistema no tempo — y(t) — assumirá o valor M ou -M.
- C. Certo
- E. Errado

O Provas e Concursos é um banco de dados de questões de concursos públicos organizadas por matéria, assunto, ano, banca organizadora, etc
